1ĪóŁh(hu©ón)Š│Ėąų¬╝╝ąg
Łh(hu©ón)Š│Ėąų¬╩ŪÖCŲ„╚╦╝╝ąg¾wŽĄīŹ¼FĄ─╗∙ĄA║═Ū░╠ߌl╝■Ż¼é„ĖąŲ„╩ŪÖCŲ„╚╦Ėąų¬Łh(hu©ón)Š│╝░ūį╔ĒĀŅæB(t©żi)Ą─┤░┐┌ĪŻ
2ĪóŁh(hu©ón)▀\äė┐žųŲ╝╝ąg
▀\äė┐žųŲ╝╝ąg╩ŪÖCŲ„╚╦īŹ¼FĘĆ(w©¦n)Č©▀\ąąĄ─▒ŻšŽŻ¼Č©╬╗ī¦║Į┼c▀\äėģf(xi©”)š{┐žųŲ×ķā╔┤¾ųž³c蹊┐ĘĮŽ“
3Īó╚╦ÖCĮ╗╗ź╝╝ąg
╚╦ÖCĮ╗╗ź╝╝ąg╩ŪīŹ¼F╚╦ÖCėąą¦£Ž═©Ą─ś“┴║Ż¼ČÓ─Ż╠ž╝ėūo╩Ū╬┤üĒ░l(f©Ī)š╣ĘĮŽ“
ĖĮ╝■Ż║
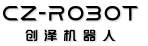
ė╔ė┌▄ø¾w▓─┴ŽĄ─░l(f©Ī)š╣Ż¼ņ`Ū╔╩ųę▓ķ_╩╝╚ß▄øŲüĒŻ¼╚ń░ž┴ų╣żśI(y©©)┤¾īWčąųŲĄ─▄ø¾wĪóŪĘ“īäėĪó╚ßąįČÓųĖņ`Ū╔╩ųĪó┐Ą─╬Ā¢┤¾īWčąųŲĄ─▄ø¾wČÓųĖņ`Ū╔╩ųĪó▒▒Š®║Į┐š║Į╠ņ┤¾īWčąųŲĄ─▄ø¾wČÓųĖņ`Ū╔╩ų
╝┘ų½ąĶę¬ų▒ĮėĄ─╚╦ŅÉ╗źäėüĒ░l(f©Ī)ō]╣”─▄Ż¼Č°ÖCŲ„╚╦╩ų═¾ät═Ļ╚½╩Ūų„äėĄ─,╝┘═¾▀Ć░³└©═Ō▓┐┐╔š{╣Ø(ji©”)╣”─▄Ż¼╚ń┐╔š{╣Ø(ji©”)─”▓┴╗“µiČ©Ż╗ÖCŲ„╚╦╩ų═¾Ą─╚╬║╬š{š¹═©│ŻČ╝╩Ūį┌┐žųŲŽĄĮy(t©»ng)ā╚═Ļ│╔Ą─
Š▀ėąŽÓ═¼öĄ┴┐ūįė╔Č╚Ą─įOéõų«ķg▀Mąą▒╚▌^ĢrŻ¼┤«ąąÖCśŗ═∙═∙▒╚▓óąąÖCśŗĖ³ķLŻ¼ī”ė┌┤«ąąÖCśŗŻ¼▀\äėĘČć·║═┼żŠžęÄ(gu©®)Ė±═©│Ż║åå╬Ąžė╔ł╠(zh©¬)ąąÖCśŗĄ─▀xō±║═╗∙▒Šą╬ĀŅÄū║╬øQČ©
3ūįė╔Č╚╚╦╣ż╩ų═¾į┌─│ą®ĘĮ├µā×(y©Łu)ė┌╚╦ŅÉĄ─╩ų═¾Ż¼╚ń▀\äėĘČć·╗“┼żŠž▌ö│÷ĪŻ▒M╣▄ę╗ą®╝┘ų½į┌įOėŗųą╝ė╚ļ┴╦3ūįė╔Č╚╩ų═¾Ż¼Ą½┤«ąą3ūįė╔Č╚╩ų═¾įOéõį┌ÖCŲ„╚╦æ¬ė├ųąĖ³Ųš▒ķ
2ūįė╔Č╚═¾▓┐ė╔ę╗éĆ┼cą²▐DŲ„┤«┬ōĄ─Ū³╝Īå╬į¬ĮM│╔Ż¼ą╬│╔ę╗éĆUą═ĻP╣Ø(ji©”)ĪŻŲõųąę╗ĘNįOéõ╩ŪOBRoboWrist Ż¼╦³┐╔ęį═¼ĢrµiūĪŪ░ą²║═Ū³Ū·Ż¼«öĮŌµiĢrŻ¼▀Ć┐╔ęį═©▀^▐Däė╩ų═¾╔ŽĄ─ĒŚ╚”üĒš{╣Ø(ji©”)▀\äė«a╔·─”▓┴ūĶ┴”
ą²▐DŲ„ė├ė┌╩╣ĮKČ╦įOéõčžŪ░▒█Ą─┐vŽ“Ę┼│÷╗“ØLäėŻ¼Č°Ū³╝Ī╩╣ĮKČ╦įOéõÅØŪ·╗“Ė®č÷, OB╝¼▌å╩Įą²▐D╩ų═¾Ż¼▒╗äė═¾▓┐čbų├Ą─µiČ©ę▓┐╔ęį═©▀^╩╣ė├▓╗┐╔Ę┤Ž““īäėĄ─ÖCśŗüĒīŹ¼F
╝┘ų½═¾įOėŗĄ─ėąą¦╗∙£╩─▄ē“ū÷3ūįė╔Č╚▀\äėŻ¼╝┤ą²Ū░/ą²║¾ĪóŪ³╔ņ║═ś’é╚/│▀é╚Ų½ęŲ,╬┤╩▄ė░ĒæĄ─═¾ĻP╣Ø(ji©”)Ż¼ŲõūŅ┤¾╗ŅäėĘČć·═©│Żį┌76Č╚/85Č╚
Ą┬ć°▓«Č„┤¾īWėŗ╦ŃÖCīWį║čąųŲĄ─▀b▓┘ū„▌å═╚Å═║ŽĄ─ęŲäė▓┘ū„ÖCŲ„╚╦┐╔═©▀^▀h│╠▓┘ū„ŲĮ┼_═Ļ│╔Ė„ĘNÅ═ļs▓┘ū„╚╬äš
ųą┐Ųį║╔“Ļ¢ūįäė╗»╦∙Ą─Wang└¹ė├╔ŅČ╚ÅŖ╗»īW┴Ģ╦ŃĘ©║═ęĢėXĖąų¬ŽÓĮY║ŽĄ─ĘĮĘ©üĒ═Ļ│╔ęŲäėÖCŲ„╚╦į┌ĘŪĮYśŗŁh(hu©ón)Š│Ž┬Ą─ęŲäė▓┘ū„
į┌Ąūīė═©▀^╩╣ė├╗∙ė┌─Żą═Ą─▓┘ū„å╬į¬Ż¼▒ŻūC┴╦╩ųųĖ┼c╬’¾wų«ķg│ų└m(x©┤)ĘĆ(w©¦n)Č©Ą─ūź╚ĪŻ╗į┌ųąīė╩╣ė├ÅŖ╗»īW┴Ģ▀MąąęÄ(gu©®)äØŻ¼Å─Č°īŹ¼F▌^ķL║═Å═ļsĄ─╩ųā╚▓┘ū„┴„│╠
╚╦ŅÉ┐╔ęį═©▀^ęĢėX║═ė|ėX╚┌║ŽĖąų¬┐ņ╦┘┤_Č©ūź╚Ī┐╔ūāą╬╬’¾w╦∙ąĶ┴”Ą─┤¾ąĪŻ¼ęįĘ└ų╣Ųõ░l(f©Ī)╔·╗¼äė╗“▀^Č╚ą╬ūāŻ¼Ą½▀@ī”ė┌ÖCŲ„╚╦üĒšf╚į╚╗╩Ūę╗éĆŠ▀ėą╠¶æ(zh©żn)ąįĄ─å¢Ņ}
─▄┐ņ╦┘īó¼Fėą╦ŃĘ©į┌īŹļH╔·«aŁh(hu©ón)Š│┬õĄžŻ¼▓ó─▄└¹ė├GPU╝ė╦┘īŹ¼F┤¾ęÄ(gu©®)─Żėŗ╦ŃŻ¼╬ęéāūį╝║┤ŅĮ©┴╦ę╗éĆGPU╝ė╦┘Ą─┤¾ęÄ(gu©®)─ŻĘų▓╝╩ĮÖCŲ„īW┴ĢŽĄĮy(t©»ng)Ż¼╚Ī├¹ąĪųTĖ