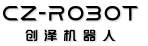

ę╗ ░ŃŪķørŽ┬Ż¼ ę╗ éĆÖCŲ„╚╦ŽĄĮyė╔Ž┬┴ą╦─éĆ╗źŽÓū„ė├Ą─▓┐ĘųĮM│╔Ż║ÖCąĄ╩ųĪóŁhŠ│Īó╚╬äš ║═┐žųŲŲ„Ż¼╚ńłD1 - 1a ╦∙╩ŠŻ¼łD1 - 16×ķŲõ║å╗»ą╬╩ĮĪŻ
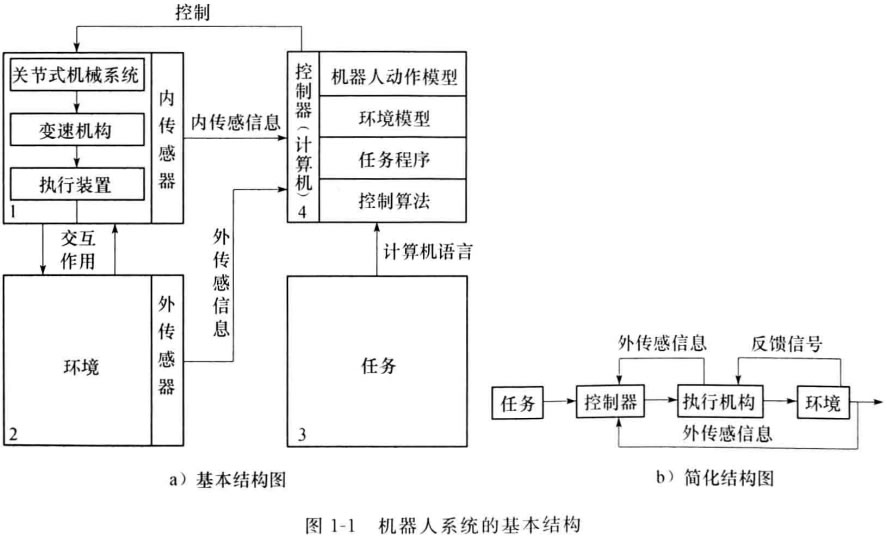
ÖCąĄ╩ų╩ŪŠ▀ėąé„äėł╠ąąčbų├Ą─ÖCąĄŻ¼╦³ė╔▒█ĪóĻP╣Ø║═─®Č╦ł╠ąąčbų├(╣żŠ▀Ą╚)śŗ│╔Ż¼ĮM║Ž×ķę╗éĆ╗źŽÓ▀BĮė║═╗źŽÓę└┘ćĄ─▀\äėÖCśŗĪŻÖC ąĄ╩ųė├ė┌ł╠ąąųĖČ©Ą─ū„śI╚╬äšĪŻ▓╗═¼Ą─ÖCąĄ╩ų Š▀ėą▓╗═¼Ą─ĮYśŗŅÉą═ĪŻłD1-2Įo│÷ÖCąĄ╩ųĄ─Äū║╬ ĮYśŗ║åłDĪŻÖCąĄ╩ųėųĘQ×ķ▓┘ū„ÖCĪóÖCąĄ▒█╗“▓┘ ū„╩ųĪŻ┤¾ČÓöĄÖCąĄ╩ų╩ŪŠ▀ėąÄūéĆūįė╔Č╚Ą─ĻP╣Ø ╩ĮÖCąĄĮYśŗŻ¼ ę╗░ŃŠ▀ėą┴∙éĆūįė╔Č╚ĪŻŲõųąŻ¼Ņ^ ╚²éĆūįė╔Č╚ę²ī¦ŖA╩ųčbų├ų┴╦∙ąĶ╬╗ų├Ż¼Č°║¾╚² éĆūįė╔Č╚ė├üĒøQČ©─®Č╦ł╠ąąčbų├Ą─ĘĮŽ“ĪŻ
ŁhŠ│ųĖÖCŲ„╚╦╦∙╠ÄĄ─ų▄ć·ŁhŠ│Ż¼╦³▓╗āHė╔Äū║╬Śl╝■(┐╔▀_┐šķg)╦∙øQČ©Ż¼Č°Ūęė╔ŁhŠ│║═ ╦³╦∙░³║¼Ą─├┐éĆ╩┬╬’Ą─╚½▓┐ūį╚╗╠žąį╦∙øQČ©ĪŻÖCŲ„╚╦Ą─╣╠ėą╠žąįė╔▀@ą®ūį╚╗╠žąį╝░ŲõŁhŠ│ ķgĄ─╗źŽÓū„ė├╦∙øQČ©ĪŻį┌ŁhŠ│ųąŻ¼ÖCŲ„╚╦Ģ■ė÷ĄĮę╗ą®šŽĄK╬’║═Ųõ╦¹╬’¾wŻ¼╦³ąĶę¬▒▄├Ō┼c▀@ ą®šŽĄK╬’░l╔·┼÷ū▓Ż¼▓óī”▀@ą®╬’¾w░l╔·ū„ė├ĪŻŁhŠ│ą┼Žóę╗░Ń╩Ū┤_Č©Ą─║═ęčų¬Ą─Ż¼Ą½į┌įSČÓ ŪķørŽ┬Ż¼ŁhŠ│Š▀ėą╬┤ų¬Ą─║═▓╗┤_Č©Ą─ąį┘|ĪŻ
╬ęéā░č╚╬äšČ©┴x×ķŁhŠ│Ą─ā╔ĘNĀŅæB(│§╩╝ĀŅæB║═─┐ś╦ĀŅæB)ķgĄ─▓ŅäeĪŻąĶę¬ė├▀m«öĄ─│╠ą“įOėŗšZčįüĒ├Ķ╩÷▀@ą®╚╬䚯¼▓ó░č╦³éā┤µ╚╦ÖCŲ„╚╦ŽĄĮyĄ─┐žųŲėŗ╦ŃÖCųą╚źĪŻ
ėŗ╦ŃÖC╩ŪÖCŲ„╚╦Ą─┐žųŲŲ„╗“─XūėĪŻÖCŲ„╚╦Įė╩šüĒūįé„ĖąŲ„Ą─ą┼╠¢Ż¼ī”ų«▀MąąöĄō■╠Ä└ĒŻ¼▓ó ░┤ššŅA┤µą┼ŽóĪóÖCŲ„╚╦Ą─ĀŅæB╝░ŲõŁhŠ│ŪķørĄ╚Ż¼«a╔·│÷┐žųŲą┼╠¢╚ź“īäėÖCŲ„╚╦Ą─Ė„éĆĻP╣ØĪŻ
ī”ė┌╝╝ąg▒╚▌^║åå╬Ą─ÖCŲ„╚╦Ż¼ėŗ╦ŃÖCų╗║¼ėą╣╠Č©│╠ą“Ż╗ī”ė┌╝╝ąg▒╚▌^Ž╚▀MĄ─ÖCŲ„╚╦Ż¼ ┐╔▓╔ė├│╠ą“═Ļ╚½┐╔ŠÄĄ─ąĪą═ėŗ╦ŃÖCĪó╬óą═ėŗ╦ŃÖC╗“╬ó╠Ä└ĒÖCū„×ķŲõļŖ─XĪŻŠ▀¾wšfüĒŻ¼į┌ėŗ ╦ŃÖCā╚┤µā”ėąŽ┬┴ąą┼ŽóŻ║
1)ÖCŲ„╚╦äėū„─Żą═ ▒Ē╩Šł╠ąąčbų├į┌╝ż░lą┼╠¢┼cÖCŲ„╚╦▀\äėų«ķgĄ─ĻPŽĄĪŻ
2)ŁhŠ│─Żą═ ├Ķ╩÷ÖCŲ„╚╦į┌┐╔▀_┐šķgā╚Ą─├┐ę╗éĆ╩┬╬’ĪŻ
3)╚╬äš│╠ą“ ╩╣ėŗ╦ŃÖC─▄ē“└ĒĮŌŲõ╦∙ꬳ╠ąąĄ─ū„śI╚╬äšĪŻ
4)┐žųŲ╦ŃĘ© ėŗ╦ŃÖCųĖ┴ŅĄ─ą“┴ąŻ¼╦³╠ß╣®ī”ÖCŲ„╚╦Ą─┐žųŲĪŻ
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |



