
ųŪ─▄Įė┤²Ę┬╚╦ÖCŲ„╚╦╩Ūę╗éĆÅ═ļsĄ─ČÓ▀BŚUÖCśŗŻ¼Š▀ėąžSĖ╗Ą─äė┴”īW╠žąįĪŻ×ķęÄäØųŪ─▄Įė┤²Ę┬╚╦ÖCŲ„╚╦Ą─ÖCśŗįOėŗąĶŪ¾Ż¼ėŗ╦ŃÖCŲ„╚╦▀\äė▀^│╠ųąĖ„ĻP╣Ø╦∙╩▄Ą─┴”║═┴”ŠžĪóĘų╬÷äė┴”īWĘĆČ©ąį║═┐žųŲęÄ┬╔Ż¼ąĶę¬Į©┴óŲõäė┴”īW─Żą═Ż¼Įo│÷▒Ńė┌▀Mąą▀\äėęÄäØ║═īŹ╩®┐žųŲĄ─öĄīW├Ķ╩÷[3]ĪŻ ė├é„ĮyĄ─▀\äėīW║═äė┴”īWĮ©─ŻĘĮ╩ĮŻ¼ī”ė┌ČÓūįė╔Č╚ÖCŲ„╚╦Ą─▀\äėŻ¼ŲõöĄīW├Ķ╩÷╩ŪÅŖĘŪŠĆąį║═Ė▀ļAŽĄĮyŻ¼Č°Ė▀ļAĘŪŠĆąį╬óĘųĘĮ│╠Ą─┴ąīæśO×ķ└¦ļyŻ¼Ū¾▓╗│÷’@╩Į▒Ē▀_╩Į║═ĮŌ╬÷ĮŌŻ¼▓╗ ─▄ė├ė┌▓ĮæBįOėŗĪŻ─┐Ū░Ż¼ć°ļH╔ŽčąŠ┐ļpūŃ▓ĮąąÖCŲ„╚╦Ą─▀\äėĢrŻ¼│Ż▓╔ė├Ų▀ŚUÖCśŗäė┴”īW ─Żą═Ż¼īóš¹éĆ═╚▓┐Ęų×ķ┤¾═╚ĪóąĪ═╚║═ūŃ▓┐Ż¼╔Ž╔ĒęĢ×ķę╗éĆ┘|┴┐ēKŻ¼Å─Č°Ą├│÷Ų▀ŚU▓ĮąąÖCŲ„╚╦äė┴”īW─Żą═ĪŻ╩┬īŹūC├„▀@ĘNĮ³╦Ų┐╔ęį▒╚▌^¼FīŹĄžĘ┤ė│ÖCŲ„╚╦Ą─äė┴”īW╠žąįŻ¼įOėŗ│÷▌^║├Ą─ąąū▀▓ĮæBĪŻ
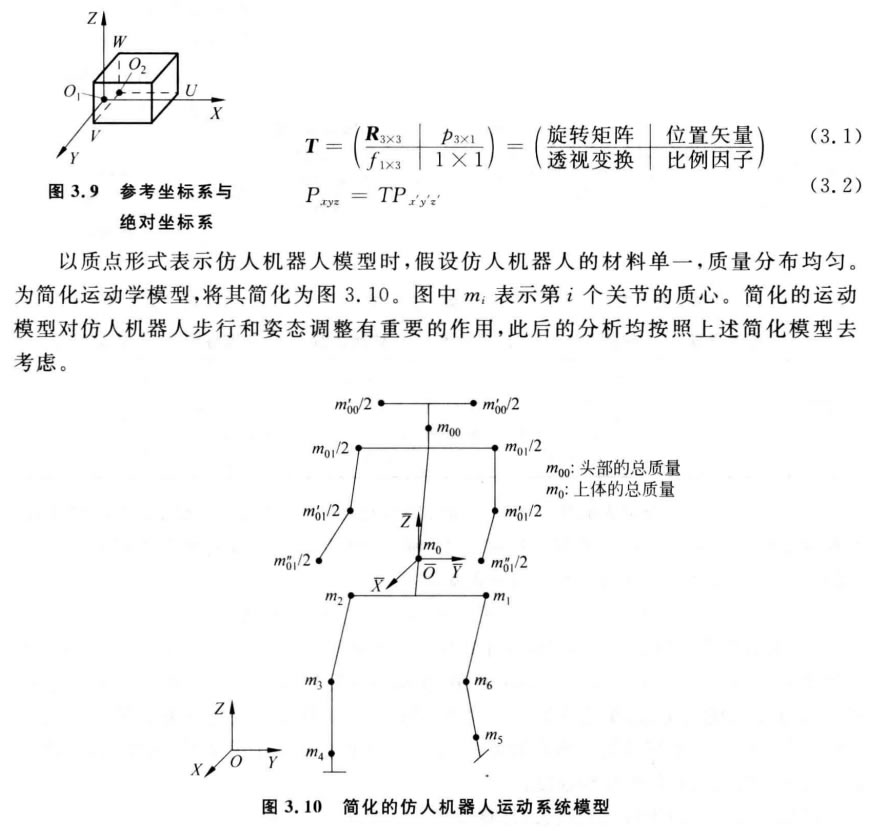
ųŪ─▄Įė┤²Ę┬╚╦ÖCŲ„╚╦│²┴╦Š▀ėą═╚▓┐Ą─ąąū▀╣”─▄═ŌŻ¼▀ĆŠ▀ėą╔Ž╔ĒĄ─╣”─▄Ż¼ūįė╔Č╚ę▓▒╚ļpūŃÖCŲ„ ╚╦│╔▒ČĄ─į÷╝ėĪŻÅ─Ę┬╔·ĮŪČ╚┐┤Ż¼╚╦Ą─╩ų▒█į┌▀\äėųąŲų°ģfš{▀\äėĄ─ū„ė├Ż¼ųŪ─▄Įė┤²Ę┬╚╦ÖCŲ„╚╦Ą─╩ų ▒█╩Ūd┴ó▀\äėĄ─Ż¼į┌ąąū▀▀\äė▀^│╠ųąŲų°ųžę¬Ą─š{š¹ū„ė├ĪŻÅ─▀\äėµ£ĮŪČ╚┐┤Ż¼ųŪ─▄Įė┤²Ę┬╚╦ÖCŲ„╚╦ė╔ė┌ėą╩ų▒█▀\äėŻ¼╣╩╦³╩Ūė╔╚²Ślµ£ĮM│╔Ą─Å═║Ž▀\äėµ£Ż¼▀\äėīWĪóäė┴”īWĪó▀\äėęÄäØ╔ŽĖ³×ķÅ═ ļsŻ¼▓╗─▄ų▒Įėė├ļpūŃÖCŲ„╚╦Ą─äė┴”īW─Żą═üĒ├Ķ╩÷[94]ĪŻ▒Š╣Øīóį┌ļpūŃÖCŲ„╚╦─Żą═Ą─╗∙ĄA╔ŽŻ¼ ĮY║ŽųŪ─▄Įė┤²Ę┬╚╦ÖCŲ„╚╦Ą─▀\äė╠ž³cŻ¼Į©┴óę╗éĆ║Ž▀mĄ─▀\äė─Żą═Ż¼ī¦│÷▓Įąą▀\äėĄ─öĄīW├Ķ╩÷ĪŻ ▒Š╣ØįOėŗĄ─╩Ūę╗éĆ19 DOF Ą─ųŪ─▄Įė┤²Ę┬╚╦ÖCŲ„╚╦Ż¼Ģ║▓╗┐╝æ]ŲõŅ^▓┐ ║═╩ųųĖĄ─ūįė╔Č╚ĪŻ
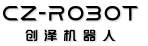
×ķ┴╦▒Ńė┌▓ĮæBĘų╬÷║═įOėŗŻ¼Į©─ŻĢrīó▄|Ė╔Į³╦Ų ×ķę╗éĆŚUŻ¼▓╗┐╝æ]ųŌĻP╣Ø▀\äėŻ¼ā╔éĆ╩ų▒█Ė„ęĢ×ķę╗éĆŚUŻ¼ų╗┐╝æ]ā╔ ▒█▀\äė«a╔·Ą─╦«ŲĮ├µ╔Žą²▐D┴”ŠžŻ¼į┌┤╦╗∙ĄA╔ŽĮ©┴óųŪ─▄Įė┤²Ę┬╚╦ÖCŲ„╚╦Ą─ ║å╗»▀\äė─Żą═[95]ĪŻŽ╚Ż¼į┌ųŪ─▄Įė┤²Ę┬╚╦ÖCŲ„╚╦Ą─č³▓┐╣╠▀Bę╗éĆģó┐╝ū°ś╦ ŽĄO₂, į┘į┌ųŪ─▄Įė┤²Ę┬╚╦ÖCŲ„╚╦▓ĮąąŲ³cĄ─ųžą─═Čė░╠ÄĮ©┴óę╗éĆŽÓī”ė┌Ąž ├µņoų╣Ą─Į^ī”ū°ś╦ŽĄO₁, łD3.9×ķģó┐╝ū°ś╦ŽĄ┼cĮ^ī”ū°ś╦ŽĄĄ─ĻPŽĄ╩ŠęŌłDĪŻā╔éĆū°ś╦ŽĄĄ─▐DōQ┐╔ęįė├Ž┬╩Į├Ķ╩÷Ż║
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |



