
╝ė╦┘Č╚é„ĖąŲ„ė├üĒÖz£yÖCŲ„╚╦Ą─╝ė╦┘Č╚Ż¼═¼śė░³└©╔Ē¾wĄ─╝ė╦┘Č╚║═Ė„ĻP╣ØĮŪ╝ė╦┘Č╚Ż¼ėąĢr║“ę▓ū„×ķęųųŲĖ„ĻP╣ØÖCąĄš±äėČ°Öz£yĪŻęŲäėÖCŲ„╚╦▒Š¾wĄ─▀\äė╝ė╦┘ Č╚║═ųž┴”╝ė╦┘Č╚ī”┐žųŲŲõū╦æBėąųžę¬ū„ė├Ż¼Č°Ė„ĻP╣Ø╝ė╦┘Č╚ī”ŲõäėæBąį─▄ĪóĘĆČ©ąį Ą╚ėąųžę¬ė░ĒæĪŻė╔ė┌╬óĘųī”įļ┬ĢĄ─Ę┼┤¾ū„ė├Ż¼╣ż│╠╔Žę╗░Ń▓╗─▄═©▀^ī”╬╗ęŲą┼╠¢Ą─ Č■┤╬╬óĘųüĒ½@Ą├╝ė╦┘Č╚ą┼╠¢Ż¼Č°ąĶę¬ė├īŻķTĄ─é„ĖąŲ„Ż¼┼cų«ŽÓī”æ¬Ą─ėą╝ė╦┘Č╚ėŗŻ¼ Ė∙ō■įŁ└Ē┐╔Ęų×ķæ¬ūā╩ĮĪóē║ļŖ╩Į║═MEMS ╝╝ągĄ╚ĪŻ
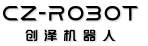
æ¬ūāŲ¼╝ė╦┘Č╚é„ĖąŲ„3:æ¬ūāŲ¼╝ė╦┘Č╚é„ĖąŲ„╩Ūė╔ę╗éĆ░Õ╗╔ų¦│ąųžÕN╦∙śŗ│╔ Ą─š±äėŽĄĮyĪŻį┌░Õ╗╔ā╔├µĘųäe┘Nā╔éĆæ¬ūāŲ¼Ż¼æ¬ūāŲ¼╩▄š±äė«a╔·æ¬ūāŻ¼ŲõļŖūĶųĄĄ─ ūā╗»═©▀^ļŖś“ļŖ┬ĘĄ─▌ö│÷ļŖē║▒╗Öz£y│÷üĒĪŻ
ē║ļŖ╩ĮŠ═╩Ū└¹ė├ē║ļŖįŁ└Ē£y┴┐ś╦£╩┘|┴┐ēK╦∙╩▄ĄĮĄ─æTąį┴”Ż¼Ė∙ō■F=ma ėŗ ╦Ń ╝ė╦┘Č╚Ż¼╦³ę▓ī┘ė┌æTąį╩Įé„ĖąŲ„ĪŻ╦³╩Ū└¹ė├─│ą®╬’┘|╚ń╩»ė󊦾wĄ─ē║ļŖą¦æ¬Ż¼į┌╝ė ╦┘Č╚ėŗ╩▄š±ĢrŻ¼┘|┴┐ēK╝ėį┌ē║ļŖį¬╝■╔ŽĄ─┴”ę▓ļSų«ūā╗»ĪŻ«ö▒╗£yš±äėŅl┬╩▀hĄ═ė┌ ╝ė╦┘Č╚ėŗĄ─╣╠ėąŅl┬╩ĢrŻ¼ät┴”Ą─ūā╗»┼c▒╗£y╝ė╦┘Č╚│╔š²▒╚ĪŻē║ļŖ╩Į╝ė╦┘Č╚é„ĖąŲ„ Š▀ėąäėæBĘČć·┤¾ĪóŅl┬╩ĘČć·īÆĪółį╣╠─═ė├Īó╩▄═ŌĮńĖ╔ö_ąĪęį╝░ē║ļŖ▓─┴Ž╩▄┴”ūį«a╔·ļŖ║╔ą┼╠¢Īó▓╗ąĶę¬╚╬║╬═ŌĮńļŖį┤Ą╚╠ž³cĪŻ
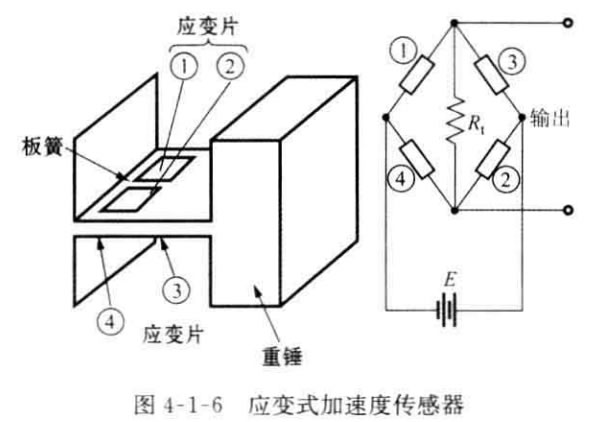
│Żė├Ą─ē║ļŖ╩Į╝ė╦┘Č╚ėŗĄ─ĮYśŗą╬╩Į╚ńłD4-1-7╦∙╩ŠĪŻłDųą(a) ╩Ū░▓čbē║ ┐są═Ż¼ē║ļŖį¬╝■ ę╗┘|┴┐ēK ę╗ ÅŚ╗╔ŽĄĮyčbį┌łAą╬ųąą─ų¦ų∙╔ŽŻ¼ų¦ų∙┼c╗∙ū∙▀BĮėĪŻ▀@ĘN ĮYśŗėąĖ▀Ą─╣▓š±Ņl┬╩ĪŻ╚╗Č°╗∙ū∙B ┼c£yįćī”Ž¾▀BĮėĢrŻ¼╚ń╣¹╗∙ū∙ B ėąūāą╬ätīóų▒ Įėė░Ēæ╩░š±Ų„▌ö│÷ĪŻ┤╦═ŌŻ¼£yįćī”Ž¾║═ŁhŠ│£žČ╚ūā╗»īóė░Ēæē║ļŖį¬╝■Ż¼▓ó╩╣ŅAŠo┴” ░l╔·ūā╗»Ż¼ęūę²Ų£žČ╚Ų»ęŲĪŻłD(c) ×ķ╚²ĮŪ╝¶Ūąą╬Ż¼ē║ļŖį¬╝■ė╔ŖA│ųŁhīóŲõŖA└╬į┌ ╚²ĮŪą╬ųąą─ų∙╔ŽĪŻ╝ė╦┘Č╚ėŗĖą╩▄▌SŽ“š±äėĢrŻ¼ē║ļŖį¬╝■│ą╩▄Ūąæ¬┴”ĪŻ▀@ĘNĮYśŗī” Ąūū∙ūāą╬║═£žČ╚ūā╗»ėąśO║├Ą─Ė¶ļxū„ė├Ż¼ėą▌^Ė▀Ą─╣▓š±Ņl┬╩║═┴╝║├Ą─ŠĆąįĪŻłD(b) ×ķŁhą╬╝¶Ūąą═Ż¼ĮYśŗ║åå╬Ż¼─▄ū÷│╔śOąĪą═ĪóĖ▀╣▓š±Ņl┬╩Ą─╝ė╦┘Č╚ėŗŻ¼Łhą╬┘|┴┐ēKš│ĄĮ čbį┌ųąą─ų¦ų∙╔ŽĄ─Łhą╬ē║ļŖį¬╝■╔ŽĪŻė╔ė┌š│ĮYä®Ģ■ļS£žČ╚į÷Ė▀Č°ūā▄øŻ¼ę“┤╦ZĖ▀ ╣żū„£žČ╚╩▄ĄĮŽ▐ųŲĪŻ
╬óļŖūėÖCąĄŽĄĮy(MEMS) ╝ė╦┘Č╚é„ĖąŲ„ė╔ė┌ ▓╔ė├┴╦╬óÖCļŖŽĄĮy╝╝ągŻ¼│▀┤ń┤¾┤¾┐sąĪŻ¼Č°Ūęųž┴┐ ąĪĪó╣”║─Ą═ĪóŠĆąįČ╚║├ĪŻČ°ŪęŻ¼ė╔ė┌╬óÖCąĄĮYśŗųŲū„ £╩┤_ĪóųžÅ═ąį║├Īóęūė┌╝»│╔╗»Īó▀mė┌┤¾┼·┴┐╔·«aŻ¼╦∙ęį Š▀ėą║▄Ė▀Ą─ąįār▒╚ĪŻMEMS╝ė╦┘Č╚é„ĖąŲ„ėą║▄ČÓ ĘNĘųŅÉĘĮĘ©Ż¼░┤ššæTąįÖz£y┘|┴┐Ą─▀\äėĘĮ╩Į┐╔Ęų×ķ ŠĆ╝ė╦┘Č╚é„ĖąŲ„║═ĮŪ╝ė╦┘Č╚é„ĖąŲ„Ż╗░┤ššėą¤oĘ┤ü ą┼╠¢┐╔Ęų×ķķ_Łh║═ķ]Łh╝ė╦┘Č╚é„ĖąŲ„Ż╗░┤šš▓─┴ŽĘų ŅÉėą╣Ķ╬ó╝ė╦┘Č╚é„ĖąŲ„Īó╩»ėó╝ė╦┘Č╚é„ĖąŲ„ĪóĮī┘ ╝ė╦┘Č╚é„ĖąŲ„Ż╗░┤ššą┼╠¢Öz£yĘĮ╩Į┐╔Ęų×ķē║ūĶ╩ĮĪó ļŖ╚▌╩ĮĪóē║ļŖ╩ĮĪó╦ĒĄ└ļŖ┴„╩Į╝░ųCš±╩ĮĄ╚ĪŻ
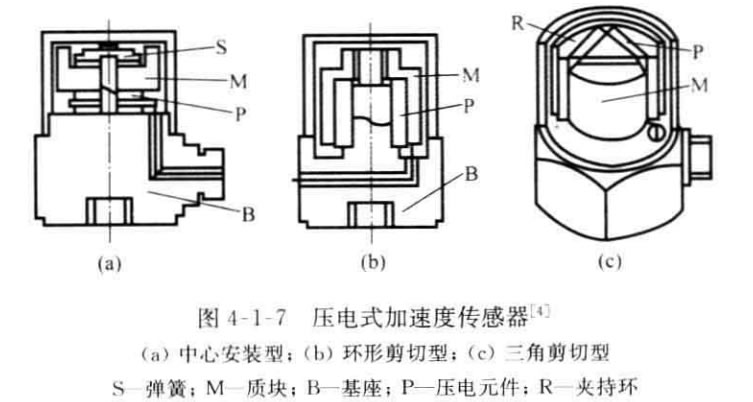
łD4-1-8 ╩Ūę╗ĘNĄõą═Ą─ē║ļŖ╩Į MEMS ╝ė╦┘Č╚é„ĖąŲ„ĮYśŗĪŻ
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |



