
╚╦ą╬ÖCŲ„╚╦░▓╚½╩ŪųĖÖCŲ„╚╦į┌įOėŗ▀\ąąŁhŠ│╝░╚╬äšł÷Š░ųąŻ¼─▄ē“ėąą¦▒ŻšŽ╚╦ ŅÉ╔·├³žö«aĪóūį╔ĒŽĄĮyĘĆČ©ęį╝░ų▄▀ģŁhŠ│░▓╚½Ą──▄┴”ĪŻŲõ║╦ą─į┌ė┌═©▀^ČÓŠSČ╚Ę└ ūoÖCųŲīŹ¼F"╚½ĘĮ╬╗░▓╚½"Ż¼╝┤į┌ė▓╝■ĮYśŗĪó▄ø╝■╦ŃĘ©Īó╚╦ÖCĮ╗╗ź║═ŁhŠ│▀mæ¬Ą╚īė ├µśŗĮ©ŅAĘ└ąį░▓╚½▒ŻšŽ¾wŽĄŻ¼Å─ÖCąĄ░▓╚½ĪóļŖÜŌ░▓╚½Īó╣”─▄░▓╚½Īóģf═¼░▓╚½Ą╚ĮŪ Č╚│÷░lŻ¼▒▄├Ōę“ŽĄĮy╣╩šŽĪó┐žųŲ╩¦ą¦╗“ŁhŠ│Ė╔ö_ę²░l╚╦╔Ēé¹║”Īóžö«aōp╩¦╗“╔ńĢ■ ’LļUĪŻ
╚╦ą╬ÖCŲ„╚╦░▓╚½Š▀ėąĖ▀Č╚╝»│╔ąįĪó╚╬äšČÓśėąį┼c╚╦ÖC╣▓╠ÄŁhŠ│Å═ļsąįĄ╚Ąõą═ ╠ž³cŻ¼øQČ©┴╦Ųõ░▓╚½▒ŻšŽąĶę¬Å─ĄūīėĮYśŗĄĮš¹¾wąą×ķųJš╣ķ_ĪóČÓīėģf═¼ĪŻ╚╦ą╬ ÖCŲ„╚╦░▓╚½▓╗āH╔µ╝░å╬ę╗▓┐╝■Ą─┐╔┐┐ąįŻ¼▀ĆĻP┬ōČÓéĆ▄øė▓╝■ŽĄĮyķgĄ─äėæB±Ņ║Ž┼c ģf═¼┐žųŲĪŻę“┤╦Ż¼╚╦ą╬ÖCŲ„╚╦Ą─░▓╚½╗∙ė┌Ī░┴Ń╝■ Ī¬ ▓┐╝■ Ī¬ Š▀╔ĒųŪ─▄¾w Ī¬ æ¬ ė├ł÷Š░Ī▒Ą─Öz£y┬ĘÅĮ▀Mąą╚½µ£┬Ęįu╣└ĪŻ
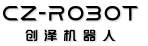
╚╦ą╬ÖCŲ„╚╦╬ŻļU╩ŪųĖ╚╦ą╬ÖCŲ„╚╦╣╠ėąĄ─Øōį┌é¹║”üĒį┤Ż¼╝┤ŲõįOėŗĪó╣”─▄╗“▀\ ąąųą┐╔─▄ī¦ų┬╬’└ĒĪóą─└Ē╗“╔ńĢ■╬Ż║”Ą─╣╠ėąī┘ąįĪŻ
╦∙ęįßśī”╚╦ą╬ÖCŲ„╚╦▀Mąą’LļUįu╣└ĢrŻ¼│²ę└ō■ GB/T15706-2012Ż©ISO 12100:2010Ż®Ą╚ś╦£╩═ŌŻ¼▀ĆąĶ└¹ė├╚½µ£ų┬ę“▀^│╠─Żą═Ą─╬Ż║”▒µūRĘĮĘ©Ż¼│õĘų╩š╝» ┐╝æ]╚╦ą╬ÖCŲ„╚╦’LļUė|░lŚl╝■║═Øōį┌╬ŻļUł÷Š░Ż¼╗∙ė┌ÖCąĄ╬ŻļUļŖÜŌ╬ŻļUĪó¤ß╬ŻļUĪó įļ┬Ģ╬ŻļUĪóšäė╬ŻļUĪó▌Ś╔õ╬ŻļUĪó▓─┴Ž/╬’┘|«a╔·Ą─╬ŻļUĪó╚╦ŅÉ╣żą¦īW╬ŻļUĪó┼c ÖCŲ„╩╣ė├ŁhŠ│ėąĻPĄ─╬ŻļUĪóŠWĮj░▓╚½╬ŻļUĪó▀h│╠╔²J╬ŻļUĪóE/E/PE ┐žųŲŅIė“Ą─ ╬ŻļUĪóAI æ¬ė├░▓╚½ŅIė“Ą─╬ŻļUĪóéÉ└ĒĄ└Ą┬╬ŻļUĄ╚Ąõą═╬ŻļUŅÉą═▀MąąĘų╬÷ĪŻ
╚╦ą╬ÖCŲ„╚╦ÖCąĄ░▓╚½╩ŪųĖ═©▀^ÖCąĄĮYśŗįOėŗĪó▓─┴Ž▀xō±Īó▀\äė┐žųŲ╝░╬’└ĒĘ└ ūoÖCųŲĄ─ŠC║Žā×╗»Ż¼┤_▒ŻÖCŲ„╚╦į┌▀\ąą▀^│╠ųą▒▄├Ōę“ÖCąĄ╣╩šŽĪó▀\äė╩¦┐ž╗“╬’└Ē Įėė|ī¦ų┬╚╦╔Ēé¹║”ĪóįOéõōpē─╗“ŁhŠ│ŲŲē─Ą──▄┴”ĪŻ
╚╦ą╬ÖCŲ„╚╦ÖCąĄ░▓╚½Ż¼ę╗ĘĮ├µ┐╔ęįģóššé„ĮyĄ─ÖCąĄ░▓╚½ę¬Ū¾ßśī”└ŌŠē║═╣šĮŪ “×ūCĪó┼õ║ŽķgŽČĪóŽ▐╬╗čbų├Īó╬ŻļUĄ─▀\äė▓┐╝■Ę└ūoĄ╚ĘĮ├µ▀Mąą┐╝æ]Ż¼┴Ēę╗ĘĮ├µ┐╔ ęįßśī”╚╦ą╬ÖCŲ„╚╦Ą─▀\äė╠ž³cča│õņoæBĘĆČ©ąįęį╝░äėæBĘĆČ©ąįĄ─ę¬Ū¾ĪŻ
╚╦ą╬ÖCŲ„╚╦ļŖÜŌ░▓╚½╩ŪųĖ═©▀^ļŖÜŌŽĄĮyįOėŗĪóĮ^ŠēĘ└ūoĪó─▄┴┐╣▄└Ē╝░╣╩šŽ┐ž ųŲĄ╚╝╝ąg╩ųČ╬Ż¼┤_▒ŻÖCŲ„╚╦į┌▀\ąąĪó│õļŖ╗“ŠSūo▀^│╠ųąŻ¼▒▄├Ōę“ļŖÜŌ╣╩šŽŻ©╚ńČ╠ ┬ĘĪó┬®ļŖĪó▀^▌dĪóļŖ┤┼Ė╔ö_Ą╚Ż®ę²░lė|ļŖĪó╗×─ĪóįOéõōpܦ╗“ŽĄĮy╩¦ą¦Ą──▄┴”ĪŻ
╚╦ą╬ÖCŲ„╚╦╣”─▄░▓╚½╩ŪųĖ═©▀^ŽĄĮy╗»Ą─įOėŗ┼c┐žųŲ▓▀┬įŻ¼┤_▒Ż╚╦ą╬ÖCŲ„╚╦į┌Ųõ╣”─▄ł╠ąą▀^│╠ųąŻ¼╝┤╩╣ę“ė▓╝■╣╩šŽĪó▄ø╝■Õeš`ĪóŁhŠ│Ė╔ö_╗“╚╦×ķš`▓┘ū„ī¦ų┬▓┐ Ęų╣”─▄╩¦ą¦ĢrŻ¼╚į─▄ŠS│ų░▓╚½ĀŅæB╗“ł╠ąąŅAČ©┴xĄ─░▓╚½Ēææ¬Ż¼Å─Č°▒▄├Ōī”╚╦åTĪó ŁhŠ│╗“ūį╔Ēįņ│╔é¹║”ĪŻ
╚╦ą╬ÖCŲ„╚╦ėąäeė┌Ę■äšÖCŲ„╚╦Īó╣żśIÖCŲ„╚╦Ą─╣żū„ł÷Š░╣żū„╚╬䚊ųŽ▐Ż¼Š▀éõ ČÓł÷Š░╣żū„─▄┴”Ż¼╣╩ę╗ĘĮ├µ╚╦ą╬ÖCŲ„╚╦┐╔ęį░┤šš▓╗═¼Ą─╣żū„ł÷Š░▀Mąą’LļUįu╣└▓ó ╠ß│÷╠žČ©Ą─╣”─▄░▓╚½įOėŗąĶŪ¾ĪŻ
╚╦ą╬ÖCŲ„╚╦ģf═¼░▓╚½╩ŪųĖį┌╚╦ŅÉĪóÖCŲ„╚╦┼c▀\ąąŁhŠ│╚²ĘĮų„¾wų«ķgĮ©┴ó│ų└mĖąų¬ĪóīŹĢr╗ź┬ō┼cäėæBæ¬ī”ÖCųŲŻ¼═©▀^ŽĄĮyąį’LļUĘ└┐ž┼cž¤╚╬ģfū„¾wŽĄŻ¼īŹ¼F’L ļUĮĄĄ═║¾Ą─š¹¾w░▓╚½ĀŅæBŻ¼ų„ę¬┐╝æ]ŽĄĮyī¦Ž“ąįĪó▀h│╠▓┘ū„ąįĪó═¼▓Įąį╝░ūįų„ąįĪŻ įōÖCųŲÅŖš{ČÓų„¾w┬ōäėĪóŁhŠ│Ėąų¬Ę┤ü┼cūį▀m欚{š¹Ż¼┤_▒Ż╚╦ą╬ÖCŲ„╚╦į┌Å═ļsæ¬ ė├ł÷Š░Ž┬Ą─░▓╚½ąįĪó┐╔┐┐ąį┼cĒgąįĪŻ
 |
| ╔╠ė├ÖCŲ„╚╦ Disinfection Robot š╣ÅdÖCŲ„╚╦ ųŪ─▄└¼╗°šŠ ▌å╩ĮÖCŲ„╚╦Ąū▒P ėŁ┘eÖCŲ„╚╦ ęŲäėÖCŲ„╚╦Ąū▒P ųvĮŌÖCŲ„╚╦ ūŽ═ŌŠĆŽ¹ČŠÖCŲ„╚╦ ┤¾Ų┴ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖCŲ„╚╦ Ę■äšÖCŲ„╚╦Ąū▒P ųŪ─▄╦═▓═ÖCŲ„╚╦ ņF╗»Ž¹ČŠÖC ÖCŲ„╚╦OEM┤·╣żÅS Ž¹ČŠÖCŲ„╚╦┼┼├¹ ųŪ─▄┼õ╦═ÖCŲ„╚╦ łDĢ°^ÖCŲ„╚╦ ī¦ę²ÖCŲ„╚╦ ęŲäėŽ¹ČŠÖCŲ„╚╦ ī¦į\ÖCŲ„╚╦ ėŁ┘eĮė┤²ÖCŲ„╚╦ Ū░┼_ÖCŲ„╚╦ ī¦ė[ÖCŲ„╚╦ ŠŲĄĻ╦═╬’ÖCŲ„╚╦ įŲ█E┐Ų╝╝ØÖÖCŲ„╚╦ įŲ█EŠŲĄĻÖCŲ„╚╦ ųŪ─▄ī¦į\ÖCŲ„╚╦ |



